 Summary of PVLS:
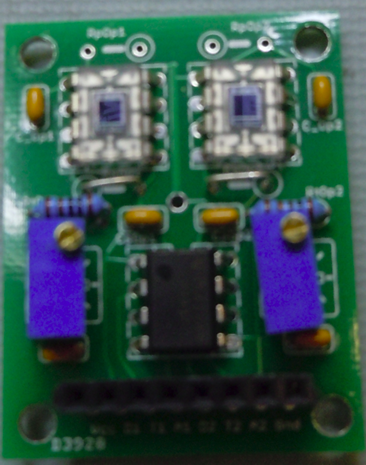
Summary of PVLS:• A simple visible light detector in the wavelength range betwen 400 to 800 nm.
• Ability to read out both analog and digital output from the photodiodes.
• Operate with a single Arduino for power supply (Single 3.3V) and readout by the Arduino.
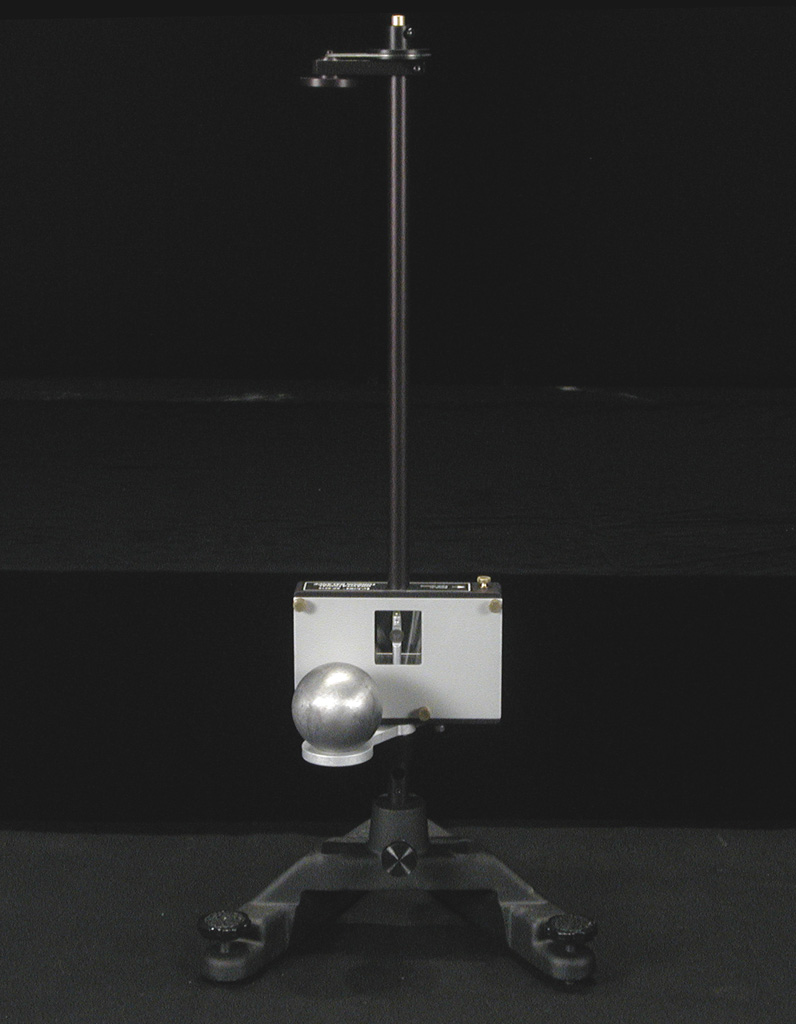
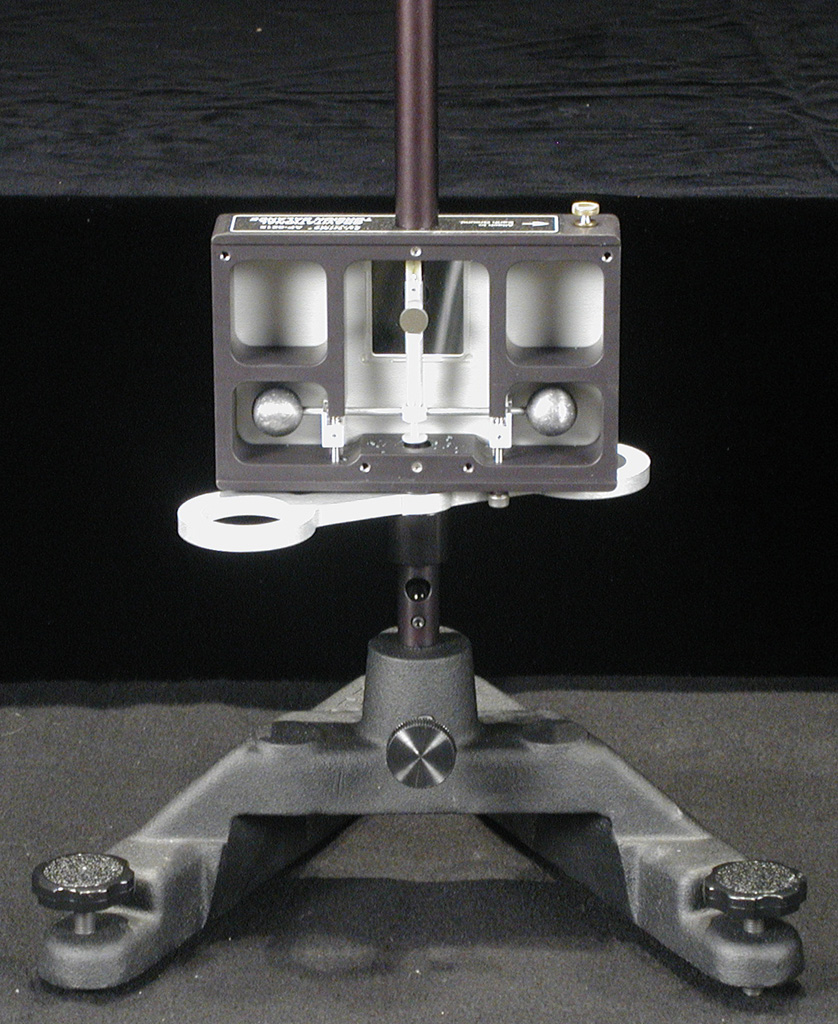
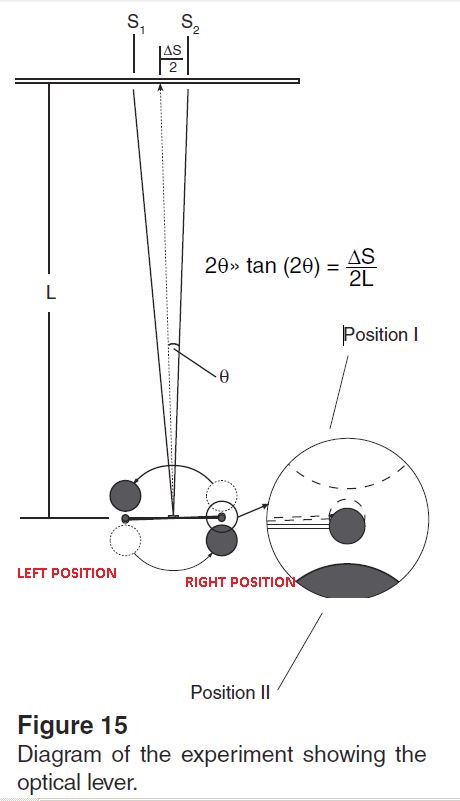
• Set of 10 sensors were tested on the Cavendish experiment.
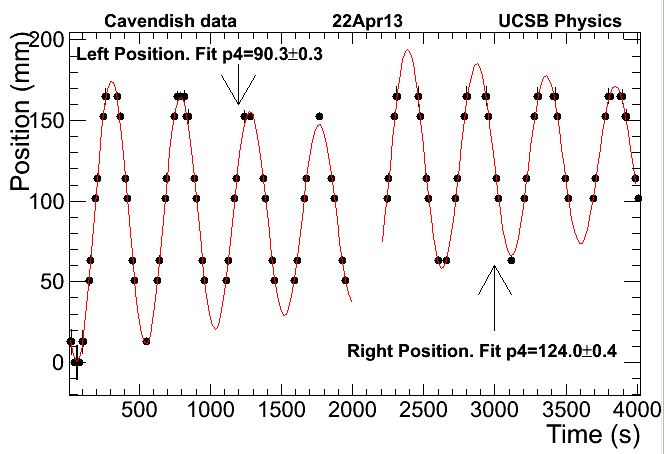
• Sample data taken for the Cavendish experiment using the PVLS
• Click on image to see full size plot.